Index
从RNN说起¶
RNN的输出:
RNN的隐藏状态:
其中\(\boldsymbol{h}^{(0)}\)是初始隐藏状态,词嵌入
词(one-hot向量)\(\boldsymbol{x}^{(t)} \in \mathbf{R}^{|V|}\)
反向传播的过程:
此策略被称为Backpropagation through time1。
评估语言模型的最基本方案是\(\mathrm{perplexity}\),
也就是交叉熵的指数。
但是,RNN需要将一个序列读入,全部计算梯度后才能反向传播,容易引起梯度消失和梯度爆炸。有人提出了梯度裁剪和 truncated backpropagation through time,但是都没有从根本上解决问题。
LSTM¶
LSTM 有三个门、三个状态:
- \(\boldsymbol f\) 被称为 forget gate,决定对 cell 的哪些状态“记住”哪些进行“遗忘”;
- \(\boldsymbol i\) 被称为“输入门”,用于决定输入\(\boldsymbol x\)的哪些部分会进入 cell;
-
\(\boldsymbol o\) 被称为“输出门”,用于决定 cell 的哪部分会影响输出;
-
\(\tilde{\boldsymbol{c}}^{(t)}\) 为由\(x\)计算得到的 cell 的新状态
- \(\boldsymbol c^{(t)}\) 为 cell 下一时刻的状态
- \(\boldsymbol h^{(t)}\) 为输出状态
GRU¶
与 LSTM 相比,GRU 没有 cell 的概念,而是使用 update gate 和 reset gate 来控制对 hidden state 的更新。
LSTM vs. GRU¶
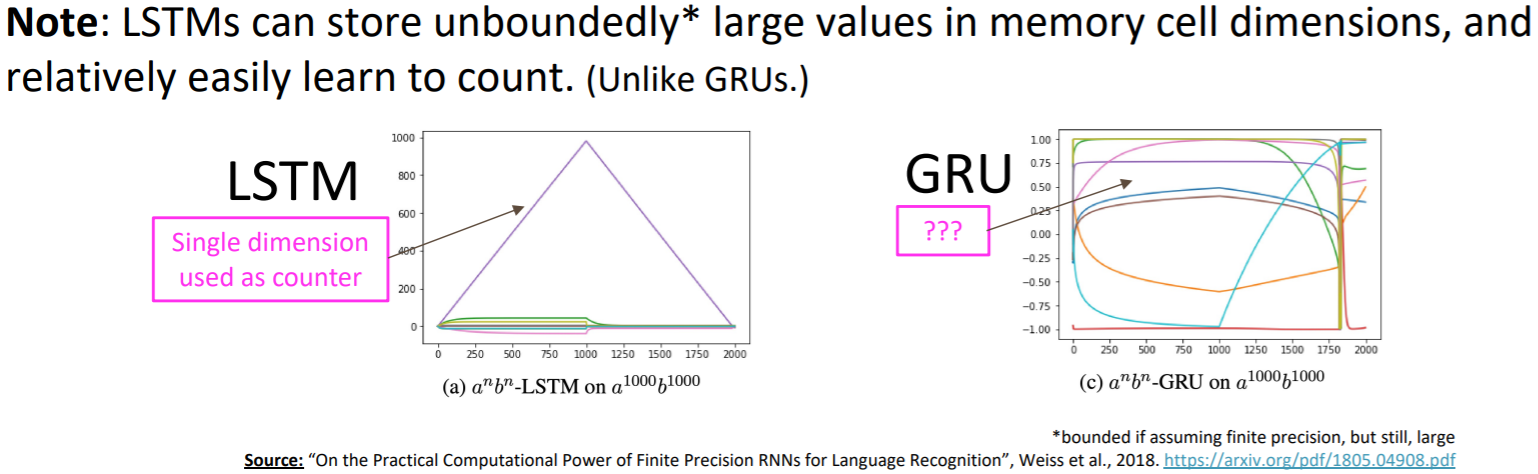
LSTM 和 GRU 是最常用的 RNN 变种,在通常情况下,LSTM 是不错的选择,但 GRU 有更少的参数量和更快的训练速度。
还有个很有意思的事实是,LSTM 比 GRU 更容易学会计数2。
实现¶
最简 LSTM 实现,来自3。
import random
import numpy as np
import math
def sigmoid(x):
return 1. / (1 + np.exp(-x))
def sigmoid_derivative(values):
return values*(1-values)
def tanh_derivative(values):
return 1. - values ** 2
# createst uniform random array w/ values in [a,b) and shape args
def rand_arr(a, b, *args):
np.random.seed(0)
return np.random.rand(*args) * (b - a) + a
class LstmParam:
def __init__(self, mem_cell_ct, x_dim):
self.mem_cell_ct = mem_cell_ct
self.x_dim = x_dim
concat_len = x_dim + mem_cell_ct
# weight matrices
self.wg = rand_arr(-0.1, 0.1, mem_cell_ct, concat_len)
self.wi = rand_arr(-0.1, 0.1, mem_cell_ct, concat_len)
self.wf = rand_arr(-0.1, 0.1, mem_cell_ct, concat_len)
self.wo = rand_arr(-0.1, 0.1, mem_cell_ct, concat_len)
# bias terms
self.bg = rand_arr(-0.1, 0.1, mem_cell_ct)
self.bi = rand_arr(-0.1, 0.1, mem_cell_ct)
self.bf = rand_arr(-0.1, 0.1, mem_cell_ct)
self.bo = rand_arr(-0.1, 0.1, mem_cell_ct)
# diffs (derivative of loss function w.r.t. all parameters)
self.wg_diff = np.zeros((mem_cell_ct, concat_len))
self.wi_diff = np.zeros((mem_cell_ct, concat_len))
self.wf_diff = np.zeros((mem_cell_ct, concat_len))
self.wo_diff = np.zeros((mem_cell_ct, concat_len))
self.bg_diff = np.zeros(mem_cell_ct)
self.bi_diff = np.zeros(mem_cell_ct)
self.bf_diff = np.zeros(mem_cell_ct)
self.bo_diff = np.zeros(mem_cell_ct)
def apply_diff(self, lr = 1):
self.wg -= lr * self.wg_diff
self.wi -= lr * self.wi_diff
self.wf -= lr * self.wf_diff
self.wo -= lr * self.wo_diff
self.bg -= lr * self.bg_diff
self.bi -= lr * self.bi_diff
self.bf -= lr * self.bf_diff
self.bo -= lr * self.bo_diff
# reset diffs to zero
self.wg_diff = np.zeros_like(self.wg)
self.wi_diff = np.zeros_like(self.wi)
self.wf_diff = np.zeros_like(self.wf)
self.wo_diff = np.zeros_like(self.wo)
self.bg_diff = np.zeros_like(self.bg)
self.bi_diff = np.zeros_like(self.bi)
self.bf_diff = np.zeros_like(self.bf)
self.bo_diff = np.zeros_like(self.bo)
class LstmState:
def __init__(self, mem_cell_ct, x_dim):
self.g = np.zeros(mem_cell_ct)
self.i = np.zeros(mem_cell_ct)
self.f = np.zeros(mem_cell_ct)
self.o = np.zeros(mem_cell_ct)
self.s = np.zeros(mem_cell_ct)
self.h = np.zeros(mem_cell_ct)
self.bottom_diff_h = np.zeros_like(self.h)
self.bottom_diff_s = np.zeros_like(self.s)
class LstmNode:
def __init__(self, lstm_param, lstm_state):
# store reference to parameters and to activations
self.state = lstm_state
self.param = lstm_param
# non-recurrent input concatenated with recurrent input
self.xc = None
def bottom_data_is(self, x, s_prev = None, h_prev = None):
# if this is the first lstm node in the network
if s_prev is None: s_prev = np.zeros_like(self.state.s)
if h_prev is None: h_prev = np.zeros_like(self.state.h)
# save data for use in backprop
self.s_prev = s_prev
self.h_prev = h_prev
# concatenate x(t) and h(t-1)
xc = np.hstack((x, h_prev))
self.state.g = np.tanh(np.dot(self.param.wg, xc) + self.param.bg)
self.state.i = sigmoid(np.dot(self.param.wi, xc) + self.param.bi)
self.state.f = sigmoid(np.dot(self.param.wf, xc) + self.param.bf)
self.state.o = sigmoid(np.dot(self.param.wo, xc) + self.param.bo)
self.state.s = self.state.g * self.state.i + s_prev * self.state.f
self.state.h = self.state.s * self.state.o
self.xc = xc
def top_diff_is(self, top_diff_h, top_diff_s):
# notice that top_diff_s is carried along the constant error carousel
ds = self.state.o * top_diff_h + top_diff_s
do = self.state.s * top_diff_h
di = self.state.g * ds
dg = self.state.i * ds
df = self.s_prev * ds
# diffs w.r.t. vector inside sigma / tanh function
di_input = sigmoid_derivative(self.state.i) * di
df_input = sigmoid_derivative(self.state.f) * df
do_input = sigmoid_derivative(self.state.o) * do
dg_input = tanh_derivative(self.state.g) * dg
# diffs w.r.t. inputs
self.param.wi_diff += np.outer(di_input, self.xc)
self.param.wf_diff += np.outer(df_input, self.xc)
self.param.wo_diff += np.outer(do_input, self.xc)
self.param.wg_diff += np.outer(dg_input, self.xc)
self.param.bi_diff += di_input
self.param.bf_diff += df_input
self.param.bo_diff += do_input
self.param.bg_diff += dg_input
# compute bottom diff
dxc = np.zeros_like(self.xc)
dxc += np.dot(self.param.wi.T, di_input)
dxc += np.dot(self.param.wf.T, df_input)
dxc += np.dot(self.param.wo.T, do_input)
dxc += np.dot(self.param.wg.T, dg_input)
# save bottom diffs
self.state.bottom_diff_s = ds * self.state.f
self.state.bottom_diff_h = dxc[self.param.x_dim:]
class LstmNetwork():
def __init__(self, lstm_param):
self.lstm_param = lstm_param
self.lstm_node_list = []
# input sequence
self.x_list = []
def y_list_is(self, y_list, loss_layer):
"""
Updates diffs by setting target sequence
with corresponding loss layer.
Will *NOT* update parameters. To update parameters,
call self.lstm_param.apply_diff()
"""
assert len(y_list) == len(self.x_list)
idx = len(self.x_list) - 1
# first node only gets diffs from label ...
loss = loss_layer.loss(self.lstm_node_list[idx].state.h, y_list[idx])
diff_h = loss_layer.bottom_diff(self.lstm_node_list[idx].state.h, y_list[idx])
# here s is not affecting loss due to h(t+1), hence we set equal to zero
diff_s = np.zeros(self.lstm_param.mem_cell_ct)
self.lstm_node_list[idx].top_diff_is(diff_h, diff_s)
idx -= 1
### ... following nodes also get diffs from next nodes, hence we add diffs to diff_h
### we also propagate error along constant error carousel using diff_s
while idx >= 0:
loss += loss_layer.loss(self.lstm_node_list[idx].state.h, y_list[idx])
diff_h = loss_layer.bottom_diff(self.lstm_node_list[idx].state.h, y_list[idx])
diff_h += self.lstm_node_list[idx + 1].state.bottom_diff_h
diff_s = self.lstm_node_list[idx + 1].state.bottom_diff_s
self.lstm_node_list[idx].top_diff_is(diff_h, diff_s)
idx -= 1
return loss
def x_list_clear(self):
self.x_list = []
def x_list_add(self, x):
self.x_list.append(x)
if len(self.x_list) > len(self.lstm_node_list):
# need to add new lstm node, create new state mem
lstm_state = LstmState(self.lstm_param.mem_cell_ct, self.lstm_param.x_dim)
self.lstm_node_list.append(LstmNode(self.lstm_param, lstm_state))
# get index of most recent x input
idx = len(self.x_list) - 1
if idx == 0:
# no recurrent inputs yet
self.lstm_node_list[idx].bottom_data_is(x)
else:
s_prev = self.lstm_node_list[idx - 1].state.s
h_prev = self.lstm_node_list[idx - 1].state.h
self.lstm_node_list[idx].bottom_data_is(x, s_prev, h_prev)-
Werbos, P.G., 1988, Neural Networks 1, and others ↩
-
http://web.stanford.edu/class/cs224n/slides/cs224n-2022-lecture06-fancy-rnn.pdf ↩
-
https://github.com/nicodjimenez https://nicodjimenez.github.io/2014/08/08/lstm.html ↩