The Mechanical design of ARGSS¶
IEEE Xploer暂时登录不上(HTTP 500),先把引文放在这里。【2021/10/17 12:55】
Joseph Redmon 的早期论文https://arxiv.org/abs/1412.3128v2中在康奈尔抓取数据集上进行实验,使用AlexNet作为骨干网络。对其进行引文追踪,发现SOTA。
或者也可以去 Papers with Code 上看[排行榜](https://paperswithcode.com/sota/robotic-grasping-on-cornell-grasp-dataset-1
Comprehensive Review on Reaching and Grasping of Objects in Robotics https://www.cambridge.org/core/journals/robotica/article/comprehensive-review-on-reaching-and-grasping-of-objects-in-robotics/527CD405F6D4509DEF52FBA3A5E317FE
https://ieeexplore.ieee.org/document/8954887/ 水面清洁无人船?
在 Cornell 抓取的数据集中有两个正样本 txt 文件中标注是 NaN,在进行训练时会导致出错,这两个文件分别为 pcd0132cpos.txt 和 pcd0165cpos.txt。由于其标注方式为每行表示一个点,每 4 行表示一个抓取框,因此只需要删除掉标注为 NaN 所在的抓取框相关的 4 行即可。
版权声明:本文为 CSDN 博主「不会写代码的完结」的原创文章,遵循 CC 4.0 BY-SA 版权协议,转载请附上原文出处链接及本声明。
原文链接:https://blog.csdn.net/qq_35218039/article/details/104296240
转载一些机械臂控制的开源项目
机械臂抓取开源项目总结
转自知乎 Zhihao
基础入门
- 首先对机械臂的整体认识:
http://blog.exbot.net/archives/3337
- CSDN 上一个博主写的抓取、机械臂控制、机械臂抓取的代码解析:
https://blog.csdn.net/zzu_seu/article/details/94617814
https://blog.csdn.net/zzu_seu/article/details/89293241
https://blog.csdn.net/zzu_seu/article/details/91347757
进阶攻略
- 项目主要为了确定抓取位置,物体的哪个位置最容易抓取,最适合抓取,所产生的结果如下图所示,最好的抓取位置通过一个长方形框出。
代码地址:https://github.com/tnikolla/robot-grasp-detection
论文:Real-Time Grasp Detection Using Convolutional Neural Networks
 {loading=lazy}
{loading=lazy}
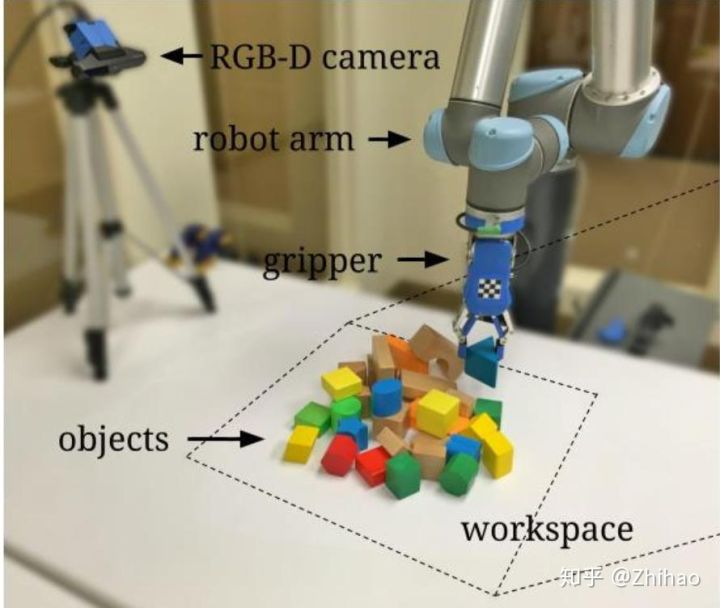
- 分别通过 VERP 仿真、UR5,实现了机械臂的抓取。
代码地址:https://github.com/andyzeng/visual-pushing-grasping
论文:Learning Synergies between Pushing and Grasping with Self-supervised Deep Reinforcement Learning
 {loading=lazy}
{loading=lazy}
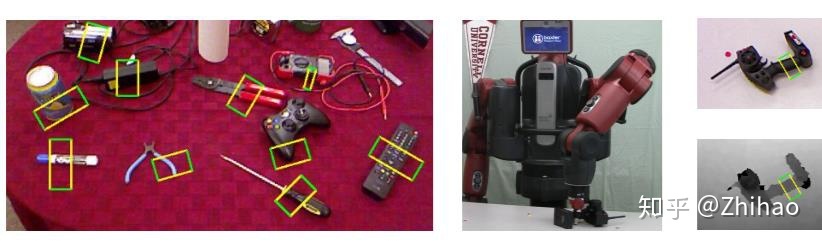
- 代码地址:https://github.com/mirsking/Deep_learning_for_detectin_robotic_grasps/tree/master/deepGraspingCode
论文:Deep Learning for Detecting Robotic Grasps
通过 matlab 实现。
 {loading=lazy}
{loading=lazy}
论文:Closing the Loop for Robotic Grasping: A Real-time, Generative Grasp Synthesis Approach
- 在 GAZEBO 仿真中,实现的机器人抓取
https://github.com/jsbruglie/grasp
 {loading=lazy}
{loading=lazy}
- 此项目在Amazon Robotics Challenge2017(https://www.amazonrobotics.com/#/)中拿到了第一名。
代码地址:https://github.com/caomw/arc-robot-vision
论文:Robotic Pick-and-Place of Novel Objects in Clutter with Multi-Affordance Grasping and Cross-Domain Image Matching
 {loading=lazy}
{loading=lazy}
- 通过 ROS2 实现的机器人抓取
https://github.com/JuFengWu/techman_robot_grasp_ros2
- 通过 ROS 实现 UR 机器人抓取。
https://github.com/chjohnkim/MaskRCNN_Grasp_Detection/tree/master/maskrcnn
- 通过 ROS 实现带有机械臂的移动机器人抓取。
https://github.com/nkuzqy/move_and_grasp
发布于 2020-02-11
一系列 CoppeliaSim 参考
DYOR:葡萄牙Armesto Ángel, Leopoldo做的一个开源机器人,可以在 CoppeliaSim 里做出来。视频教程(YouTube) B 站搬运
Scopus
导出日期:2021-11-04
Yu, Q., Shang, W., Zhao, Z., Cong, S., Li, Z.
56067482600;23470800900;57208215166;7005067661;57218308705;
Robotic Grasping of Unknown Objects Using Novel Multilevel Convolutional Neural Networks: From Parallel Gripper to Dexterous Hand
(2021) IEEE Transactions on Automation Science and Engineering, 18 (4), pp. 1730-1741.
https://www.scopus.com/inward/record.uri?eid=2-s2.0-85090452520&doi=10.1109%2fTASE.2020.3017022&partnerID=40&md5=719814a5140511d1d5a5878cf8987756
DOI: 10.1109/TASE.2020.3017022
文献类型: Article
出版阶段: Final
来源出版物: ScopusScopus
导出日期:2021-11-04
Jiang, D., Li, G., Sun, Y., Hu, J., Yun, J., Liu, Y.
57194035495;13408307700;57191647189;57199837914;57214990509;57217425906;
Manipulator grabbing position detection with information fusion of color image and depth image using deep learning
(2021) Journal of Ambient Intelligence and Humanized Computing, 12 (12), pp. 10809-10822. 被引用 18 次.
https://www.scopus.com/inward/record.uri?eid=2-s2.0-85098598248&doi=10.1007%2fs12652-020-02843-w&partnerID=40&md5=502c69e8dc6d79d0b75bb71dd94978cc
DOI: 10.1007/s12652-020-02843-w
文献类型: Article
出版阶段: Final
来源出版物: ScopusComprehensive Review on Reaching and Grasping of Objects in Robotics
基于改进 CenterNet 的机械臂抓取检测
Robot grasp detection using multimodal deep convolutional neural networks
Robotic grasping: from wrench space heuristics to deep learning policies
Robotic Grasping of Unknown Objects Using Novel Multilevel Convolutional Neural Networks: From Parallel Gripper to Dexterous Hand
Robotic picking in dense clutter via domain invariant learning from synthetic dense cluttered rendering[Formula presented]
Manipulator grabbing position detection with information fusion of color image and depth image using deep learning